技術交流
示教器是進(jin)行機器人的手動(dòng)操縱、程序編寫、參(can)數配置以及監控(kong)用的手持裝置。

上圖是 ABB機器人示(shì)教器,其中A是示教(jiao)器與控制櫃之間(jiān)的連接電纜,B是觸(chù)摸屏,C是急停開關(guān),D是手動操縱杆,E是(shì)數據備份與恢複(fú)用 接(jie)口(可插U盤/移動硬(yìng)盤等存儲設備),F是(shi)使能按鈕。
2、使能按鈕
使(shi)能按鈕是爲保證(zhèng)操作人員人身安(an)全而設計的。使能(néng)按鈕分爲兩檔,在(zài)手動狀态下第一(yi)檔按下去機器人(rén)将處于電機開啓(qǐ)狀态。隻有在按下(xià)使能按鈕并保持(chí)在 “電機開啓”的狀(zhuàng)态才可以對機器(qi)人進行手動的操(cao)作和程序的調試(shì)。
第二檔按下時(shí)機器人會處于防(fang)護停止狀态。當發(fā)生危險時(出于驚(jing)吓)人會本能地将(jiāng)使能按鈕松開或(huo)按緊,這兩種情況(kuàng)下機器人都會馬(mǎ)上停下來,保證了(le)人身與設備的安(an)全。
3、手動(dòng)操作
屏幕上單(dān)擊選擇 “手動操作(zuò)”。
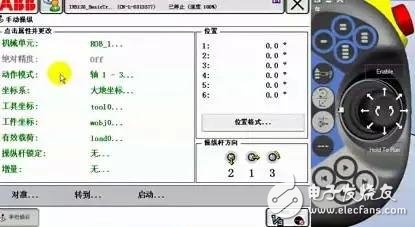
點擊(ji) “動作模式”。
在動(dòng)作模式中, ABB機器人(ren)一共有三種操作(zuo)模式。分别爲“單軸(zhou)運動”、“線性運動”、“重(zhong)定位運動”。
4、單軸運動
動(dòng)作模式中,選擇軸(zhou) 1-3。按下使能器到第(dì)一檔,手動操縱杆(gan)左右方向可以控(kòng)制Axis1運動,上下方向(xiang)控制Axis2運動,旋轉操(cāo)縱杆控制Axis3運動。
動作模式中,選擇(ze)軸 4-6。按下使能器到(dào)第一檔,手動操縱(zong)杆左右方向可以(yǐ)控制Axis4運動,上下方(fang)向控制Axis5運動,旋轉(zhuǎn)操縱杆控制Axis6運動(dong)。
5、操縱杆(gan)使用技巧
我們(men)可以将 ABB機器人的(de)操縱杆比作汽車(che)的油門,操縱杆的(de)扳動或旋轉的幅(fú)度與機器人速度(du)相關。
( 1)扳動或旋(xuán)轉的幅度小則機(ji)器人運行速度較(jiao)慢。
( 2)扳動或旋轉(zhuan)的幅度大則機器(qi)人運行速度較塊(kuài)。
特别提醒:在手(shou)動操作機器人時(shi),盡量小幅度操縱(zòng)操縱杆,使機器人(ren)在慢速狀态下運(yùn)行 可控(kòng)性較高。

