技術交流
一、DSP與TI
爲什麽提到(dào)電機控制很多人(rén)首先會聯想到DSP?而(er)談到❓DSP控制總繞不(bu)過TI,首先DSP芯片是一(yī)種具有特殊結構(gòu)的微處理器。該芯(xīn)片的内部采用程(cheng)序和數據分開的(de)哈佛結構,具有專(zhuān)門👣的硬件乘法器(qì),提供特殊的指令(lìng),可以用來快速地(dì)實現各種數字信(xìn)号處理算法。
二(èr)、常見的電機控制(zhi)算法及研究方法(fǎ)
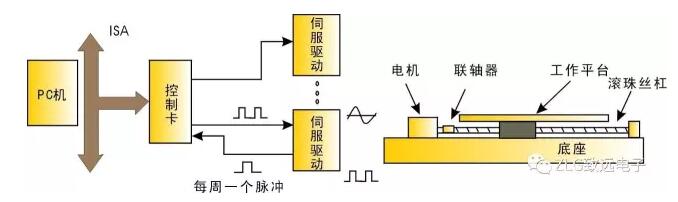
1、電機控制按工作(zuò)電源種類劃分:可(ke)分爲直流電機和(he)交流電機。按結構(gòu)和工作原理可劃(huà)分:可分爲直流電(diàn)動機、異步電動機(jī)、同步電動機。不同(tong)的電機所⭕采用的(de)驅動方式也是不(bú)相同的,這次主要(yào)介紹伺服電機,伺(sì)服主要靠脈沖來(lái)定位,伺服電機接(jie)收到1個脈沖,就會(huì)旋轉1個脈沖對應(ying)的角度,從而實現(xian)位移,因此,伺服🍉電(dian)機本身具備發出(chu)脈沖的功能,所以(yi)伺服電機每旋轉(zhuan)一個角度,都會發(fa)出對應數量的👨❤️👨脈(mo)沖,同時又與伺服(fú)電機接受的脈沖(chong)形成了呼應😘,或者(zhě)叫閉⛱️環,進而很精(jīng)确的控制電機的(de)轉動💛,從而😘實現精(jing)确的定位🐉,可以達(da)到0.001mm。
伺服電機相比(bi)較普通電機優勢(shì)在于控制精度、低(di)頻✔️扭矩,過載🐇能力(lì),響應速度等方面(miàn),所以被廣泛使用(yong)于⭐機器人,數控機(ji)床,注塑,紡織等行(hang)業,如下圖所示。
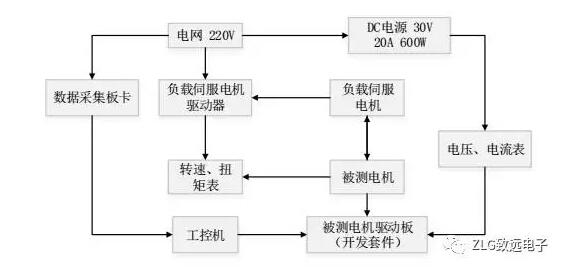
2、傳(chuán)統控制平台隻關(guān)注電機特性,新的(de)運動控制平台由(yóu)電🍓機及加載系統(tong)、電機驅動程序調(diào)試系統、數🚩據采集(jí)和電源系統組成(cheng)。從電機到驅動構(gou)建出完整的硬件(jian)軟件實驗環境,提(tí)供全開放式的軟(ruan)硬件接口,具有豐(fēng)富的可擴展性教(jiāo)學體驗,全面可靠(kào)的保護措施,可✌️做(zuo)電機識别,堵轉,電(diàn)機效率測試,電機(ji)參數測定,電機T-N曲(qǔ)線測試,電機運動(dong)控制及編碼器矢(shǐ)量轉矩,無感矢量(liang)速度分析等測試(shi),系統如下圖所示(shi)。
三、PWM控制及測試結(jié)果
脈沖寬度調制(zhì)是利用微處理器(qì)的數字輸出來對(dui)模拟電路進行控(kòng)制的一種非常有(you)效的技術,廣泛應(ying)用在從測量、通信(xin)到功💃率控制與變(biàn)換的許多領域中(zhōng),脈沖寬度調制是(shi)一種模拟控制方(fang)式,其根據相應載(zǎi)荷的變化來調制(zhi)晶體管基極或MOS管(guǎn)栅極的偏置,來實(shí)現晶體管或MOS管導(dǎo)通時間的改變,從(cong)而實現開關穩壓(yā)❗電源輸出的改變(bian),MES-100測試波形如下圖(tú)所示。



