傳統(tǒng)電機測試平(ping)台的控制誤(wù)差
傳統電機測(cè)試平台由于(yú)隻對電機轉(zhuan)速、轉矩進行(háng)開環控制,忽(hū)略了由夾具(ju)和電機負載(zai)引入的誤差(cha),無法爲用戶(hù)提供精準的(de)電機測量結(jie)果。
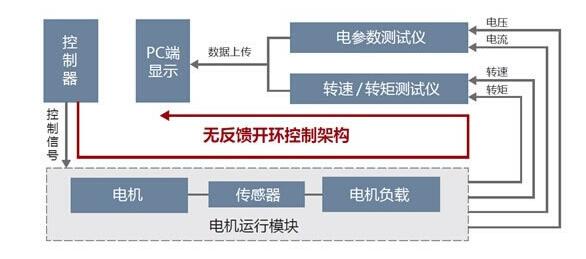
圖(tú)1 傳(chuan)統電機測試(shi)平台架構圖(tú)
誤(wù)差出現的原(yuan)因
電機測試系(xi)統(測功機)出(chu)現轉速和扭(niu)矩誤差的原(yuan)因可總結爲(wèi)以下三點:
1.
電機負載自(zi)身存在控制(zhi)誤差,控制信(xìn)号與實際負(fu)載轉矩不完(wán)全匹配;
3. 由于轉(zhuan)速和轉矩間(jiān)存在函數關(guan)系,所以上述(shu)兩種誤差同(tong)樣會對轉速(su)産生影響。
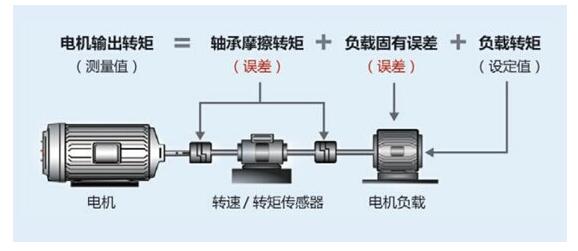
圖2 誤差出(chu)現的原因
如何(he)保證電機測(cè)試平台的高(gao)控制精度?
緻遠(yuǎn)電子MPT 電機測試(shì)系統采用先(xiān)進的智能PID 控制(zhì)架構,由專業(yè)電機測試軟(ruǎn)件MotorTest、電機運行模(mo)塊和高精度(dù)功率分析儀(yi)三部分組成(cheng)一個閉環反(fan)饋系統,電機(jī)轉速、轉矩控(kòng)制精度高達(dá)0.5%,爲(wèi)用戶提供最(zui)爲精準的電(dian)機性能分析(xī)。
在(zai)測試過程中(zhōng),高精度功率(lü)分析儀對電(diàn)機的轉速、轉(zhuǎn)矩進行實時(shí)測量,上傳到(dào)MotorTest 軟(ruan)件對測試數(shu)據與設定值(zhí)進行比對,若(ruò)兩者有偏差(cha),系統控制模(mo)塊則對電機(ji)的轉速\ 轉矩進(jìn)行負反饋調(diao)節,然後再次(cì)進行采樣比(bǐ)對,直至測試(shì)數據與設定(dìng)值在精度範(fàn)圍内一緻,再(zài)開始進行系(xì)統測試與分(fen)析,真實呈現(xiàn)電機性能。
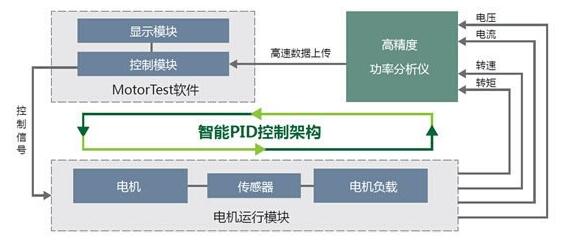
3 MPT 電機測(cè)試系統架構(gou)圖
實測案例
以電(dian)機特性曲線(xian)測試爲例:用(yòng)戶設定轉矩(jǔ)爲10~100N•m 時(shi),傳統電機測(ce)試平台的偏(piān)差高達5%,而MPT 電機測(ce)試系統的轉(zhuan)矩控制誤差(cha)低至0.36%,滿足用戶(hù)對電機特性(xìng)進行精準分(fen)析的需要。

圖4